
















三防平板电脑中的陀螺仪是一种用来测量旋转角度的设备,又叫角速度传感器,但一个角速度传感器不是陀螺仪,只有在 XYZ 三个轴方向上,各放一个角速度传感器,才叫陀螺仪,又叫三轴陀螺仪。
三轴陀螺仪的基本原理如下:它是利用高速旋转的陀螺稳定不倒的原理,经过扩展应用而做成的。为了说明原理,先说一下XYZ轴,XY轴是平面二维,如图1所示。再加一个垂直Z轴,则叫立体三维,如图13-2所示。
图1 平面二维坐标

图2 立体三维坐标
三防平板电脑中的三轴陀螺仪的构造原理可以用三个圆环和一个转子的合成来描述,其基本原理如图 3所示。

图3 陀螺仪的构造原理
三防平板电脑中的三轴陀螺仪最内环的转子高速旋转,利用旋转的惯性,中间的转子保持稳定的方向不变,这也是作为测试其他 3 个圆环的旋转角的基准参考点,这个转子就像 XYZ 轴的中心原点 O 一样,是测量的起点,即测量的基准参考点,当由于外力使陀螺仪的姿态发生变化时,这三个圆环(或之一)的角度就会发生变化,也就是圆环的旋转角发生了变化,经过测量转换,就可以得出代表旋转角度的数据。三防平板电脑通过这些数据,就可以知道陀螺仪的姿态发生了哪些变化,例如,是俯仰,还是滚动、航向等的变化。关于俯仰、滚动、航向的说明如图13-4所示。
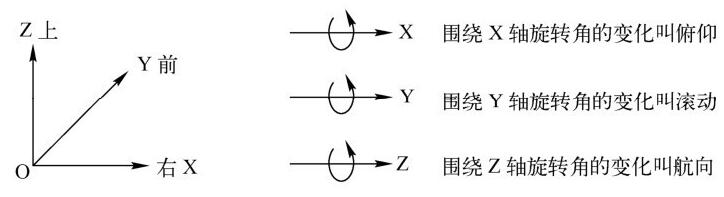
图4 物体姿态的定义
三防平板电脑中的关于俯仰、滚动、航向的定义是针对物体的姿态进行定义的,也就是 X、Y、Z 轴旋转角度的变化,其中围绕 X 轴旋转角的变化,叫俯仰;围绕 Y 轴旋转角的变化叫滚动;围绕Z 轴旋转角的变化叫航向。而三轴旋转角的变化代表物体的姿态发生了变化,如飞机、潜艇、汽车,甚至是平板电脑,这些物体位置的改变,就说明这些物体的姿态发生了改变,也就是 X、Y、Z 轴的旋转角发生了改变。用陀螺仪就可以测量出这些变化的数据,将这些数据送给 CPU 处理后,CPU 根据这些数据发出相应的控制命令,作出相应的控制或修正,使这些物体设备能更好更稳定的工作。
由上述可知,陀螺仪主要用来测量旋转的角度,又叫角速度。根据精度不同,可以分为机械陀螺仪、激光陀螺仪、MEMS 陀螺仪,这些陀螺仪广泛应用于航母、潜艇、飞机、火箭,制导、跟踪、锁定、导航、汽车、游戏、相机防抖等各个方面,有的陀螺仪配合加速度计和电子指南针,可以获得更好、更精确的结果。
三防平板电脑3G4200 的工作流程为:上电正常后,芯片内部进行初始化,初始化完成后,进入准备好的就绪状态。当平板电脑或其他设备(装有该芯片的载体)的姿态发生改变时,L3G4200 就会将旋转角度等数据保存起来,然后向 CPU 发送一个中断信号(INT 引脚变低电平),CPU 检测到中断以后,就通过 I2
C 总线中的 SDA 引脚将 L3G4200 中的数据取走,经过处理后送给相应的应用程序使用,或者送给显示器显示,又或者由 CPU 去做相应的控制。

图5 L3G4200与CPU的电路连接
几种常见陀螺仪的引脚定义如图13-9 和图13-10所示。

图6 陀螺仪芯片MPU3100的引脚定义

图7 陀螺仪芯片MPU6050的引脚定义
三防平板电脑中使用的陀螺仪是采用 MEMS(微机械和电子系统)技术制造的,它的外观就是一块集成电路。其外观如图8所示。
图8 陀螺仪传感器集成电路
陀螺仪传感器集成电路主要包括MEMS内部传感器(Inertial Sensor MEMS)和大规模集成电路 ASIC 两部分,其内部构造如图9 所示。图 10 是内部 MEMS 放大后的照片。
平板电脑中常用的陀螺仪型号包括:L3G4200、MPU6050/3050/3100、ADXRS450、L3G462(模拟输出)。
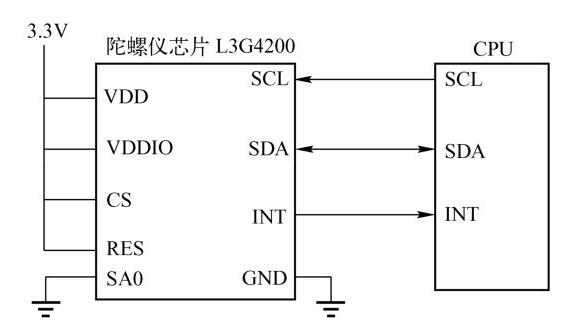
图9 陀螺仪的内部构造
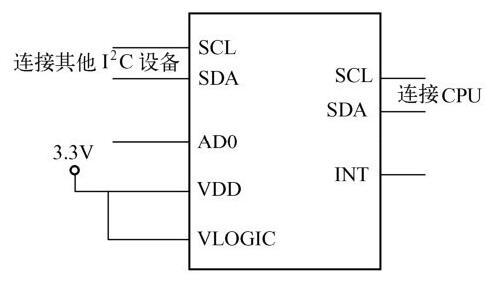
图10 MEMS放大后的照片13.1.2 陀螺仪电路的工作原理
三防平板电脑中的陀螺仪电路的型号比较多,但原理和引脚定义都差不多,现以L3G4200为例说明。
L3G4200 是采用 MEMS 制造的,内含温度传感器的三轴陀螺仪,可通过 I2
C 总线或SPI总线进行控制和数据传输。
L3G4200芯片的引脚定义如下:
1脚VDDIO:I/O引脚的电源;
2脚SPC/SCL:I2
C总线和SPI总线的时钟输入脚;
3脚SDA/SDI:I2
C总线的数据脚,SPI总线的数据输入端;
4脚SDO/SA0:SPI总线的数据输出端和I2
C总线的地址选择;
5脚CS:总线选择(选择SPI,选择I2
C总线);
6脚DRDY/INT2:数据就绪和中断;
7脚INT:中断;
8~12脚RES:保留(接地);
13脚GND:接地;
14脚PLL FILT:锁相环滤波端;
15脚RES:保留(接电源);
16脚VDD:电源。
其中第 4 脚 SA0 是总线地址选择,因为 I2
C 总线为了区分和选择哪个芯片进行数据传输可以并接多个设备(芯片),所以通过此芯片的地址(如0x6H)来选择哪个芯片进行数据传输,SA0这个引脚就是确定某个地址用的。第5脚CS是选择总线用的,因为该芯片可以用两种数据总线(I2
C 总线和 SPI 总线)进行传输控制,当 CS 接地时,即“0”时选择SPI 总线,当 CS 接电源时,即“I”选择 I2
C 总线。L3G4200 和 CPU 的连接电路如图10所示。



