
















三防平板电脑控制器局域网(Controller Area Network,CAN)总线是一种用于实时场合的串行通信协议,可用双绞线来传输信号。该协议由德国的Bosch公司开发,用于汽车中各种不同电子元件之间的通信,以此取代配电线束。例如,三防平板电脑发动机管理系统、变速箱控制器、仪表装置和电子主干系统中均嵌入CAN总线控制装置。CAN总线协议的特性包括高完整性的串行数据通信、提供实时支持、传输速率高达1 Mbps,同时具有11位的寻址以及检错能力。
三防平板电脑CAN总线控制系统强调集成、规模化的工作方式,具有抗干扰能力强、实时性好、系统错误检测和隔离能力强的优点。由于 CAN 总线优点突出,其应用范围目前已不再局限于汽车行业,也广泛应用在航空航天、航海、机械工业、农用工业、机器人、数控机床、医疗器械及传感器等领域。
1.CAN总线工作原理
CAN总线属于现场总线之一,也是一种多主方式的串行通信总线。总线使用串行数据传输方式,可以1 Mbps的传输速度在40 m双绞线上运行,也可以使用光缆连接,而且这种协议支持多主控器。CAN与I2C总线的许多细节很类似,但也有一些明显的区别。
三防平板电脑在CAN总线中,每一个节点都是以AND方式连接到总线的驱动器和接收器上的。CAN总线使用差分电压传送信号,两条信号线分别为CAN_H和CAN_L,静态时均是2.5 V,此时状态被称为逻辑1,也被称为隐性。用CAN_H比CAN_L高表示逻辑0,称为显性,此时CAN_H的电压为3.5 V,CAN_L的电压为1.5 V。当所有节点都传送1时,总线被称为隐性状态;当一个节点传送0时,总线处于显性状态。数据以数据帧的形式在网络上传送。
CAN总线是一种同步总线,所有的发送器必须同时发送,节点通过监听总线上位传输的方式使自己与总线保持同步,数据帧的第一位提供了帧中的第一个同步机会。数据帧以1个“1”开始,以7个“0”结束(在2个数据帧之间至少有3个位的域)。分组中的第一个域包含目标地址,该域被称为仲裁域,目标标识符长度是11位。如果数据帧用来从标识符指定的设备请求数据时,后面的远程传输请求(RTR)位被设置为0,当RTR=1时,分组被用来向目标标识符写入数据。三防平板电脑控制域提供一个标识符扩展和4位的数据域长度,但在它们之间要有1个“1”。数据域的范围是0~64 B,这取决于控制域中给定的值。数据域后发送一个循环冗余校验(CRC)用于错误检测。确认域用于发出一个是否帧被正确接收的标识信号,发送端把一个隐性位(1)放到确认域的ACK中,如果接收端检测到了错误,它强制该位变为显性的0值。如果发送端在ACK中发现了一个0在总线上,就必须重发。CAN总线的标准数据帧结构如图6-30所示。
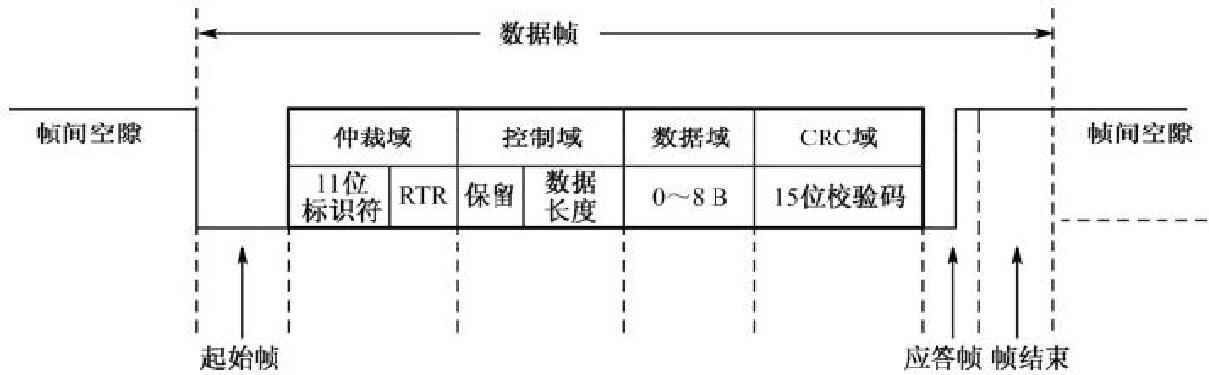
图1 CAN总线的标准数据帧结构
2.CAN总线特点及组成结构
三防平板电脑CAN总线具有传送速度快、网络带宽利用率高、纠错能力强、低成本、传输距离远(长达10 km)、数据传输速率高(高达1 Mbps)等特点,还具有可以根据报文的ID决定接收或屏蔽该报文、可靠的错误处理和检错机制、发送的信息遭到破坏后可自动重发、节点在错误严重的情况下具有自动退出总线的功能。由于 CAN 总线协议执行非集中化总线控制,所有信息传输在系统中分几次完成,从而实现高可靠性通信。
三防平板电脑CAN总线也存在时延不确定的现象,由于每一帧信息包括0~8 B的有效数据,只有在具有最高优先权传输帧的延时是确定的,其他帧只能根据一定的模型估算。另外,由于CAN总线的数据传输方式单一,限制了它的功能。例如,CAN总线通过网上下载程序就比较困难。CAN总线的网络规模一般是在50个节点以下。CAN总线控制器体系结构如图6-31所示。
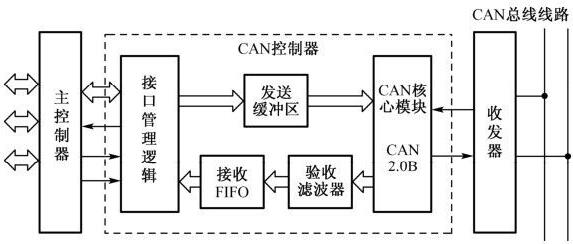
图2 CAN总线控制器的体系结构
3.CAN总线接口的设计
三防平板电脑无论是在微处理器中内嵌CAN总线控制器(如LPC2294微处理器),还是在系统中采用独立的CAN总线控制器,都需要通过CAN总线收发器(CAN驱动器)连接到CAN物理总线。国内常用的CAN总线收发器是82C250(全称为PCA82C250),它是Philips公司的CAN总线收发器产品,其作用是增加通信距离、提高系统的瞬间抗干扰能力、保护总线、降低射频干扰和实现热防护,该收发器至少可挂接110个节点。另外还有TJA1050、TJA1040可以替代 PCA82C250产品,而且它们的电磁辐射更低,无待机模式。为了进一步提高系统的抗干扰能力,往往还会在CAN总线控制器和CAN总线收发器之间增加一个光电隔离器件。
在实际应用中,三防平板电脑也可以使用由Philips公司生产的CAN总线控制器芯片SJA1000T替代PCA82C250。ARM微处理器和SJA1000T以总线方式连接,其中,SJA1000T的复用总线和ARM微处理器的数据总线连接。SJA1000T的片选、读写信号均采用ARM微处理器总线信号,地址锁存ALE信号由读写信号和地址信号通过GAL产生。在写SJA1000T寄存器时,首先往总线的一个地址写数据,此时读写信号无效,ALE变化产生锁存信号。然后写另一个数据,读写信号有效。控制 CAN 总线时,首先初始化各寄存器;发送数据时,首先置位命令寄存器,然后写发送缓冲区,最后置位请求发送。接收端通过查询状态寄存器,读取接收缓冲区可获得信息。
CAN总线每次可以发送10 B的信息(CAN2.0A)。发送的第1字节和第2字节的前3位为ID号,第4位为远程帧标记,后4位为有效字节长度。软件设置时可以根据ID号选择是否屏蔽上述信息,也可以通过设置硬件产生自动验收滤波器。8个有效字节代表什么参数,可以自行定义内部标准,也可以参照DeviceNet等应用层协议。
CAN总线主要用于汽车电子领域,特别适合汽车环境中的微控制器通信,在车载的各个电子装置之间交换信息,形成汽车电子控制网络。图6-32给出了在一辆小型汽车内的基于CAN总线的汽车电子应用系统架构示意图,图2中含有4条CAN总线,并且含有4种MPU与CAN总线控制器的配置方法。


